This page gives details on the widgets that are in the “Navigation” subsection. They can be accessed by customizing the XCTrack Pro pages pre-installed on AIR³. Remember that your customisations will be lost if you reset XCTrack Pro interface with AIR³ Manager, if you change the profile (Kiss, Easy, Expert, Paramotor) or if you load a different configuration file ‘xcfg’.
Click on the + sign to read the details.
[accordion][spoiler title=”Compass and wind” open=”yes” style=”default” icon=”plus” anchor=”” class=””]
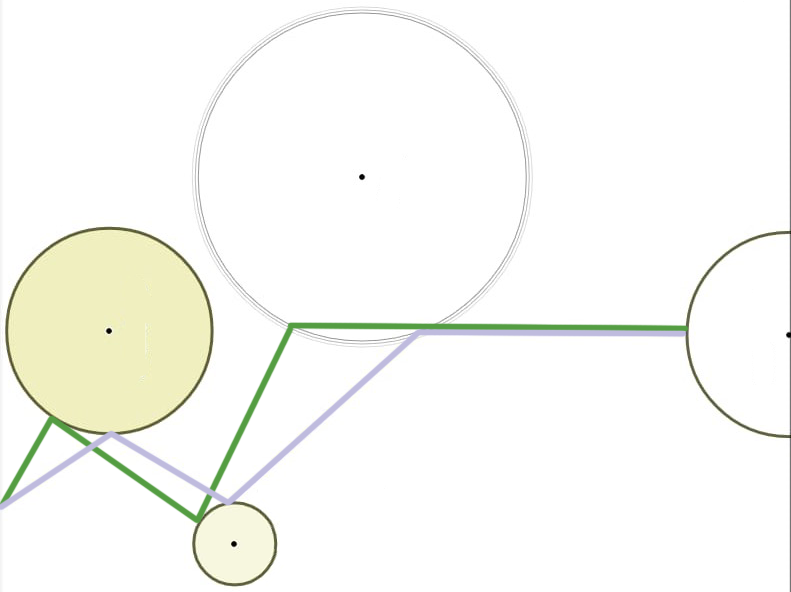
Graphical display of various direction information such as North, wind and navigation.

The widget gives you the choice of what to display:
- the target direction (see below “show arrow to”)
- the wind direction (“Show wind arrow”)
- the style of wind direction display. If you select “Arc-style wind arrow” after selecting “Show wind arrow”, you will get an arc-style display instead of an arrow. Read below…
- the heading direction (“show heading arrow”)
- the bearing direction (“show bearing arrow”)
- A background dial (“show background dial”), including North.
Depending on the settings, you may be able to graphically determine the influence of the wind on the course.
If the pilot is flying towards the wind or against the wind, the bearing direction and the heading direction will be the same. Therefore the arrows will directly indicate the top of the compass unless you have decided to set north at top.
If the pilot flies at 90 ° to the wind, the stronger the wind, the greater the difference between heading and bearing direction will be. By setting up the background dial with heading at top, displaying bearing direction arrow, you will see the bearing arrow that will not indicate the top as the wind is modifying the course. The same will occur by setting up bearing at top and displaying heading direction arrow.

This compass for example is showing the bearing direction while the compass is set to have the heading at top.
By setting up north at top, you may show both heading and bearing arrow. In this case you will directly see the difference between these two arrows.



BEARING and HEADING
Here is a small reminder to better understand bearing and heading:

By default, XCTrack uses the Bearing/track direction thanks to the GPS, the wind speed and direction to compute the Heading direction.
By enabling “Use internal compass” in Menu/Preferences/Connection & sensors, XCTrack uses the information coming from the internal compass to display the Heading.
Read more details on using the internal compass in the Preferences page of XCTrack Pro manual.











[spoiler title=”Side view” open=”yes” style=”default” icon=”plus” anchor=”” class=””]

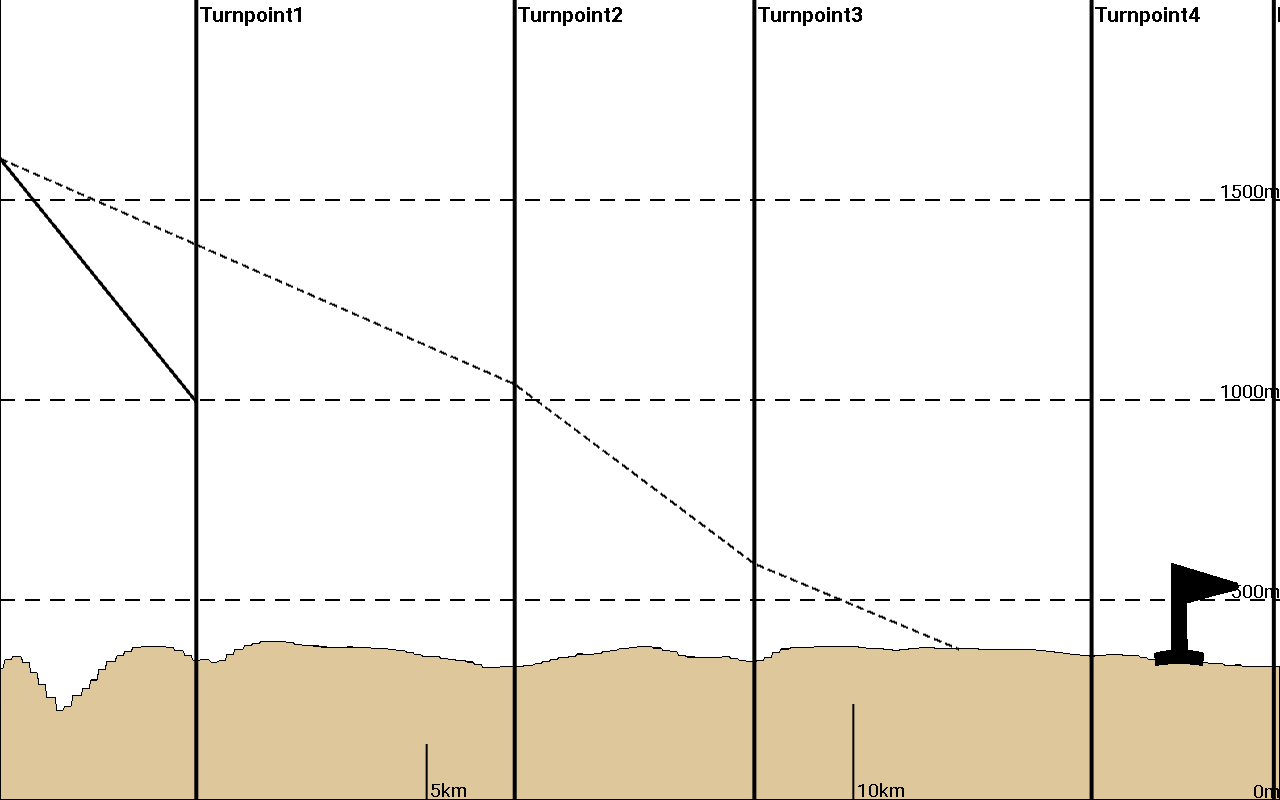


The “current bearing” setting means that the side view displays what is in front of the pilot, in the direction he is flying to. For example, if you are facing NorthEast with a strong NorthWest wind, flying to East NorthEast… your current bearing is East NorthEast, not NorthEast.
The widget has a small eye on the right when the side view is set on “Current bearing”.

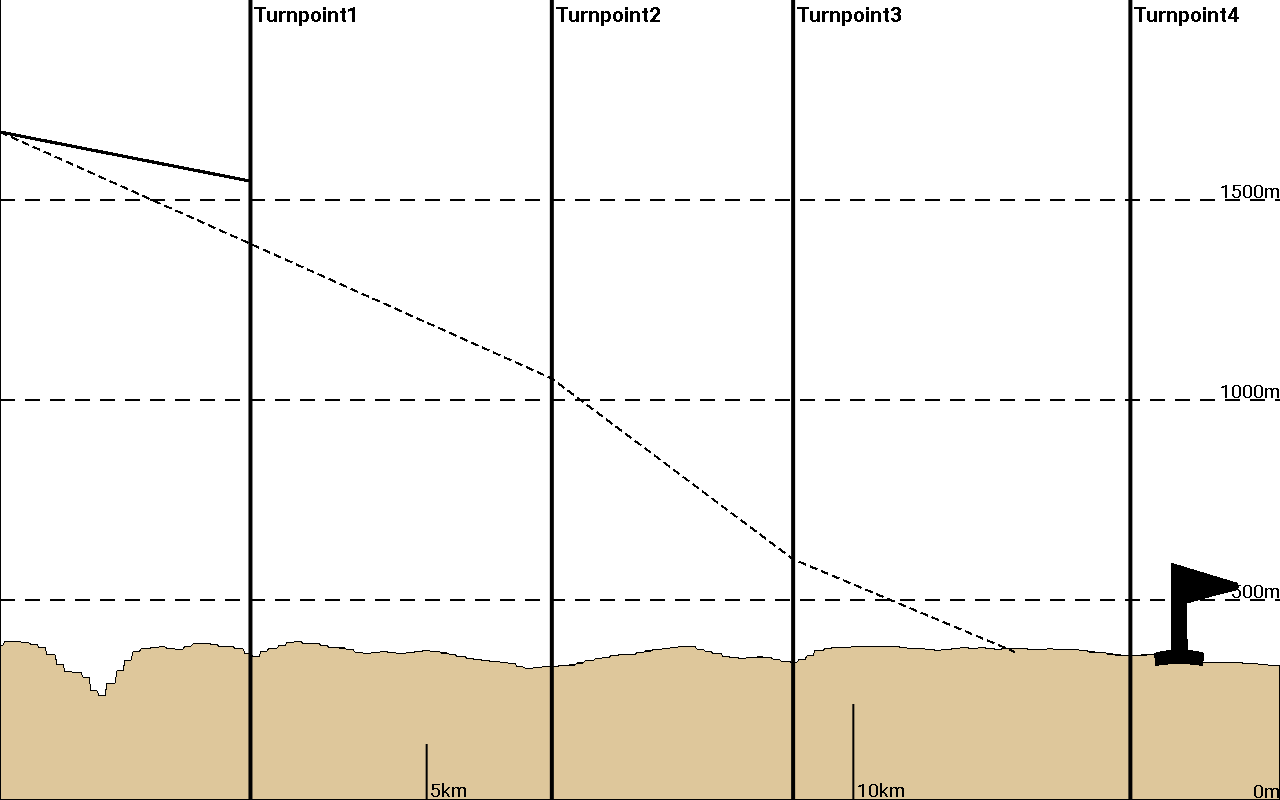
The “navigation direction” setting means that the side view displays what is between the pilot an the next turnpoint.
The widget has a small flag on the right when the side view is set on “Navigation direction”.


[spoiler title=”Next Turnpoint” open=”yes” style=”default” icon=”plus” anchor=”” class=””]

[spoiler title=”Distance Next” open=”yes” style=”default” icon=”plus” anchor=”” class=””]


[spoiler title=”Next TP TOA” open=”yes” style=”default” icon=”plus” anchor=”” class=””]




[spoiler title=” Next TP Height ” open=”yes” style=”default” icon=”plus” anchor=”” class=””]


[spoiler title=” Glide Ratio to TP ” open=”yes” style=”default” icon=”plus” anchor=”” class=””]
Units can be changed (m <-> Ft) in Menu/Preferences/Display/Units/Altitude
You can decide if you want to display it with or without leading 1:



[spoiler title=” Airspace proximity ” open=”yes” style=”default” icon=”plus” anchor=”” class=””]
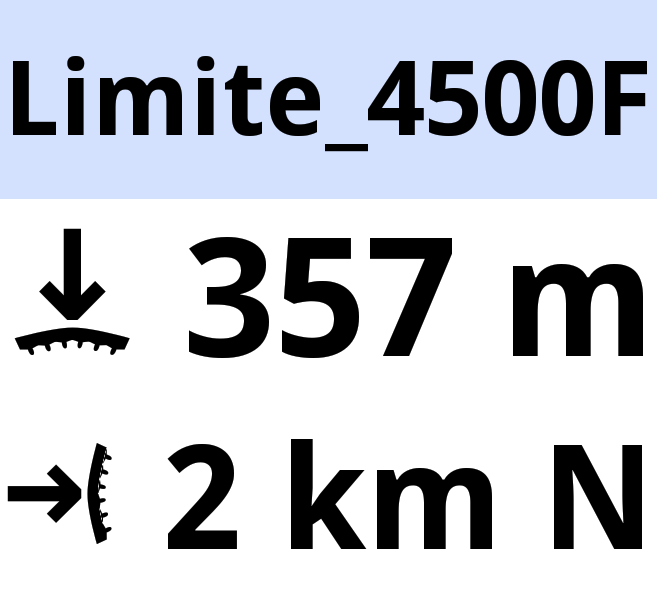
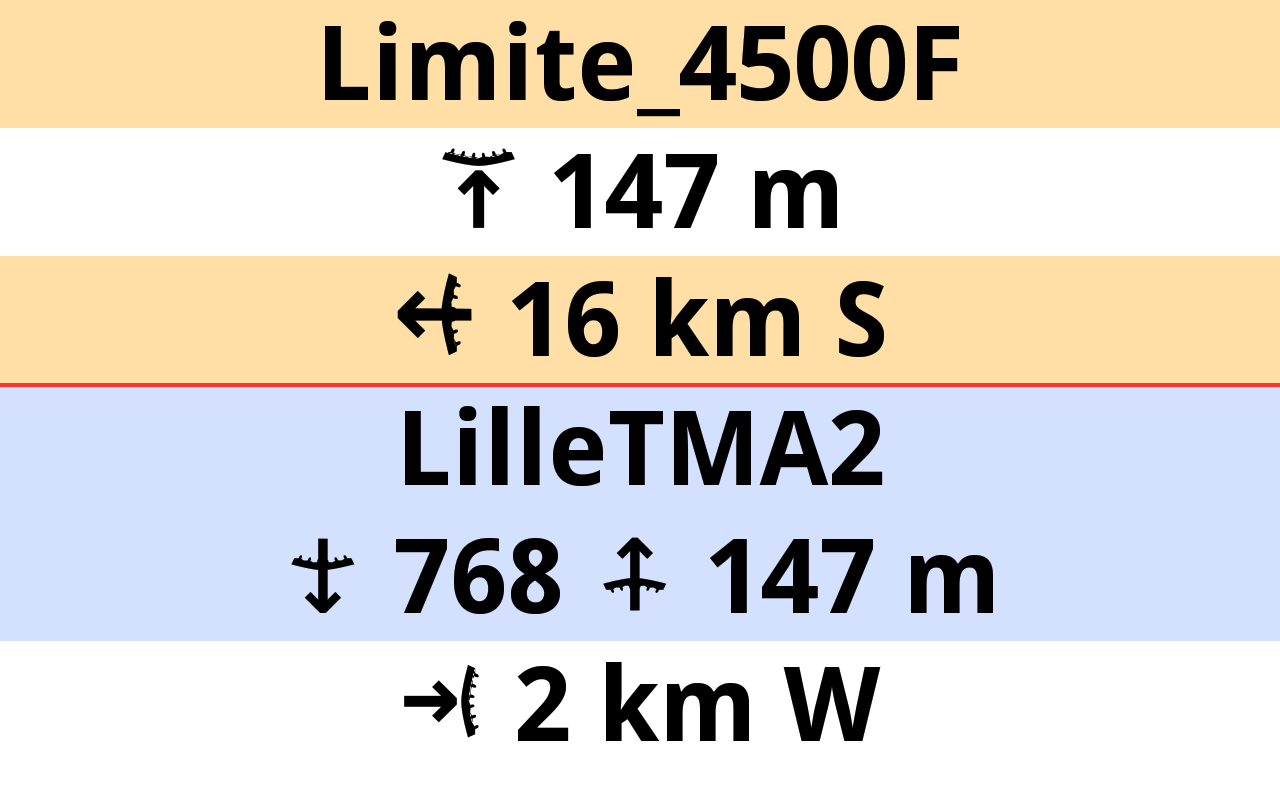
Shows airspace description, distance to the airspace (vertical and horizontal) and a color code allowing to identify quickly the proximity level with the airspace zone(s).
Read more details about how to setup Airspaces in Menu/Preferences/Airspaces
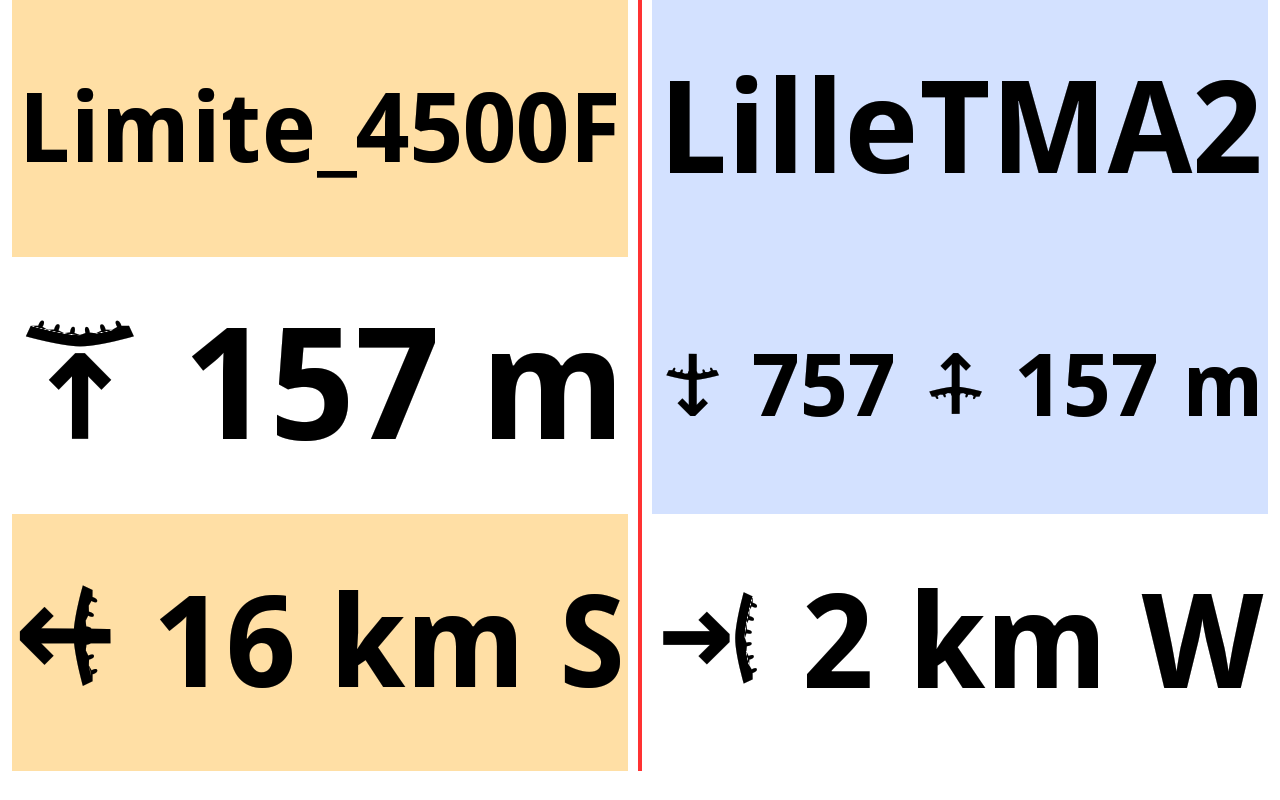
The widget is divided into 3 parts
- Name of the zone with altitude info

- Vertical distance to the vertical border (floor or ceiling)
- Horizontal distance to the horizontal border (as in a 2D map)
A ‘scaled distance’ is used to determine the level of proximity (the color code) with the airspace zone. Vertical distance and horizontal distance are taken into account to determine the ‘scaled distance’ with a ratio of 4:1, giving more importance to vertical distance proximity versus horizontal distance proximity.

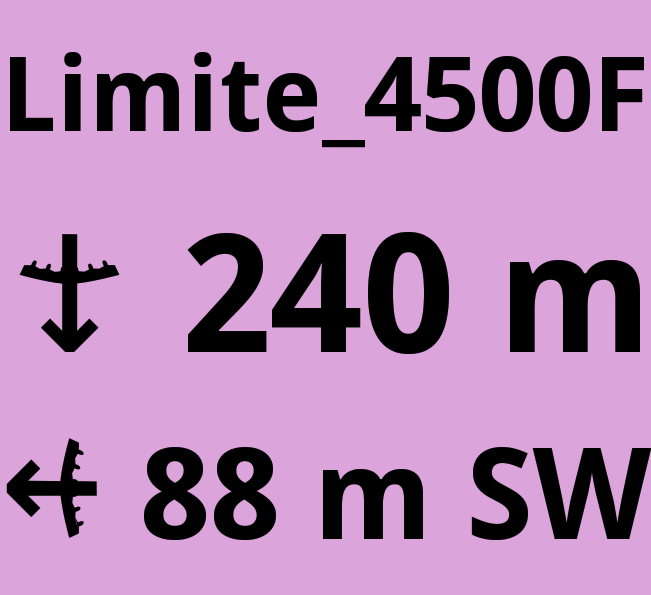
If you are flying in the prohibited airspace zone, the widget is purple. The widget shows the nearest border (=the shortest way to leave the airspace).
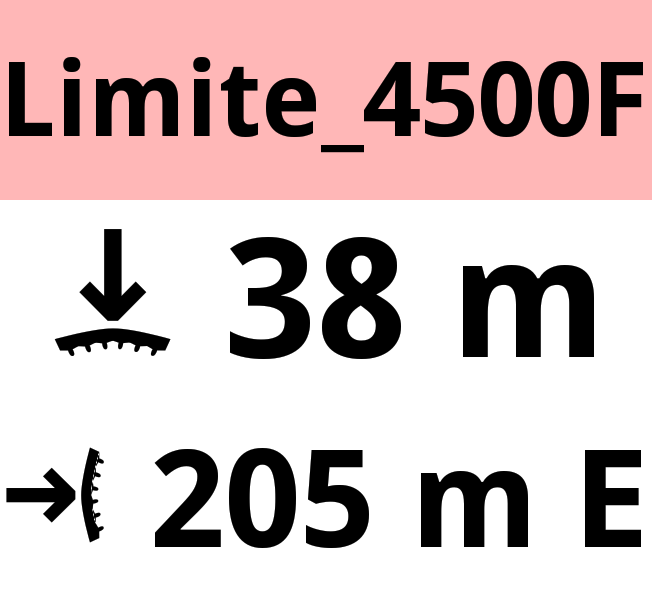
If the pilot is below the airspace zone (horizontal distance away from the border of the zone is 0 m), the airspace is red, once the vertical distance is less than 100 m. It will turn orange once the vertical distance is greater than 100m but less than 500 m. These vertical distance limits will decrease while you are away from the zone.
The vertical and horizontal distance parts of the widget will get colored depending on the fact that you are outside the limits or inside the limits.
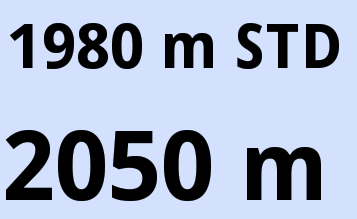
Airspace altitudes, determined as flight levels are computed according to the standard pressure (STD). So the very same airspace will have different vertical borders every day (because of different atmospheric pressure). To know more about flight levels and Standard altitude, check the description of Flight Level and Baro Altitude in the Flying section. You can also read more details in the Wiki.
Vertical distance to an airspace zone limit determined as flight level is computed based on the baro standard (STD) altitude. Vertical distance to an airspace zone limit determined as AMSL or AGL is computed based on the GPS altitude. If you are watching your altitude based on the GPS altitude, you may be surprised by the remaining vertical distance to the floor of the airspace zone that would be set on flight level.
Here are a few examples of colored widget depending on the proximity of the airspace zone:
















[spoiler title=” Distance from takeoff ” open=”yes” style=”default” icon=”plus” anchor=”” class=””]
Shows distance from detected takeoff.


[spoiler title=” Course to takeoff ” open=”yes” style=”default” icon=”plus” anchor=”” class=””]
Shows course to the takeoff.
You can display numeric value degrees instead of Cardinal and Ordinal directions.


Next section: